- صفحه اصلی
- محصولات
- مقالات و اخبار
- درباره ما
- تماس با ما
روش های کنترل سرعت در موتورهای القایی
بهترین روش کنترل دور به وسیله کنترل همزمان ولتاژ و فرکانس می باشد. چون مقدار فوران میدان مغناطیسی دوار موتورهای القایی متناسب با نسبت ولتاژ به فرکانس می باشد. بنا براین در صورتی که به همان نسبت که ولتاژ را تغییر می دهیم مقدار فرکانس را نیز تغییر دهیم ، در نتیجه مقدار دامنه ی میدان مغناطیسی دوار موتور تغییری نمی نماید و در نتیجه در کار ماشین اختلالی وجود نخواهد داشت. از طرف دیگر با تغییر مشخصات منبع تغذیه منحنی گشتاور بر حسب سرعت تغییر خواهد نمود. عیب این روش در قیمت بسیار بالای مبدل هایی می باشند که به صورت همزمان فرکانس و ولتاژ را کنترل می نمایند و همچنین دارای ساختمان پیچیده ای هستند و تعمیر و نگهداری آن ها مشکل می باشد و بعضا هزینه های مربوط به این مبدل ها از هزینه مربوط به خود موتور بیشتر می گردد . بنابراین در بسیاری از مواقع از لحاظ اقتصادی استفاده از این روش برای کنترل سرعت موتور القایی مقرون به صرفه نمی باشد.
کنترل کننده های دور موتورهای الکتریکی هر چند که ادوات پیچیده ای هستند ولی چون در ساختمان آن ها از مدارات الکترونیک قدرت استاتیک استفاده می شود و فاقد قطعات متحرک می باشند، از عمر مفید بالایی برخوردار هستند. مزیت دیگر کنترل کننده های دور موتور توانایی آن ها در عودت دادن انرژی مصرفی در ترمزهای مکانیکی و یا مقاومت های الکتریکی به شبکه می باشد. در چنین شرایطی با استفاده از کنترل کننده های دور مدرن می توان از اتلاف این نوع انرژی جلوگیری نمود. کنترل کننده های دور موتور انواع مختلفی دارند. آن ها قادر هستند انواع موتورهای AC و DC را کنترل کنند. البته در نوعی دیگری از طبقه بندی می توان روش عملکرد کنترل کننده های سرعت را به صورت زیر طبقه بندی نمود:
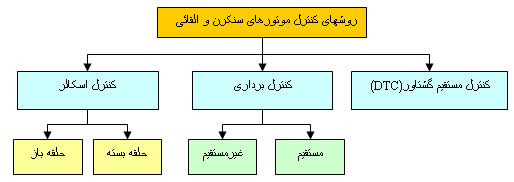
- روش تثبیت نسبت ولتاژ به فرکانس (یا کنترل V/F ثابت)
ساده ترین روش کنترل موتورهای AC روش تثبیت نسبت ولتاژ به فرکانس می باشد. این روش، به طور گسترده در کاربردهای صنعتی مورد استفاده قرار می گیرد. این نوع کنترلرها از نوع اسکالر بوده و به صورت حلقه باز با پایداری خوب عمل می کنند. مزیت این روش سادگی سیستمهای کنترلی آن است. در مقابل این نوع کنترلرها برای کاربردهای با پاسخ سریع مناسب نمی باشند.
- روش کنترل برداری روبات ها و ماشین های ابزار نمونه هایی از کاربردهای با دینامیک بالا هستند. در این کاربردها روش های کنترلی برداری استفاده می شود. در روش های کنترلی برداری با تفکیک مولفه های جریان استاتور به دو مولفه تورک ساز و فلو ساز، و کنترل آنها با استفاده از رگولاتورهای PI ترتیبی داده می شود که موتور AC نظیر موتور DC کنترل شود و به این ترتیب تمام مزایای موتور DC از جمله پاسخ گشتاور سریع آن ها در موتورهای AC نیز در دسترس خواهد بود.
- روش کنترل مستقیم گشتاور (Direct Torque Control)
پاسخ گشتاور در روشهای برداری حدود ms 20– 10 و در روش های کنترل مستقیم گشتاور (Direct Torque Control) این زمان حدود ms 5 است.
درایو
درایو یا کنورتور فرکانس و یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورهای AC (موتورهای سه فاز) استفاده می گردد. درایوها قادرند دور موتور را از صفر تا چندین برابر دور نامی موتور و به طور پیوسته تغییر دهند.
تنظیم دور در الکتروموتورها علاوه بر منعطف نمودن پروسه های صنعتی ، در کاربردهای زیادی منجر به صرفه جویی انرژی هم می گردد. علاوه بر آن درایوها جریان راه اندازی کشیده شده از شبکه را به میزان زیادی کاهش می دهند. به طوری که این جریان خیلی کمتر از جریان اسمی موتور است.درایوها می توانند موتور را به طور نرم و کاملا کنترل شده استارت و استپ نمایند. زمان استارت و استپ را می توان به دقت تنظیم نمود. این زمان ها می توانند کسری از ثانیه و یا صدها دقیقه باشد. توانایی درایو در استارت و استپ نرم موجب کاهش قابل ملاحظه تنش های مکانیکی در کوپلینگ ها و سایر ادوات دوار می گردد.






