- صفحه اصلی
- محصولات
- مقالات و اخبار
- درباره ما
- تماس با ما
نحوه کارکرد کنترل دور موتور AC یا اینورتر
کنترل دور موتور چیست؟
کنترل کننده دور و گشتاور موتورالکتریکی برای انتقال انرژی از منبع آن به فرآیند تحت کنترل است .
کنترل دور در انواع DCوAC وجود دارد اما بدلیل محدودیتهای موتورهای DC نظیر قیمت ، اندازه و مشکلات نگهداری امروزه از موتورهای القایی AC که از سادگی ، قیمت پایین و قابلیت مناسب برخوردار هستند استفاده می شود لذا کنترل دور AC علیرغم پیچیده تر بودن بتدریج جایگزین نوع DC خود شده است.کنترل دور موتور AC به نام اینورتر و درایو AC نیز شناخته می شود.
موتورهای القایی AC یا موتورهای آسنکرون (Asynchronous)
به منظور شناخت کارکرد اینورتر لازم است از کارکرد موتور القایی شناخت مناسبی بدست آورد. موتور القایی مانند یک ترانسفورماتور کارمی کند. هنگامی که استاتور (سیم پیچ بیرونی است که ثابت است) به یک منبع سه فاز متصل می شود یک میدان مغناطیسی دوار با فرکانس منبع تغذیه تولید می شود.
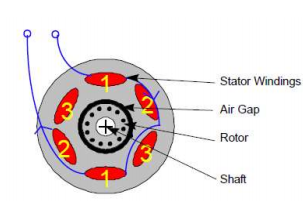
این میدان در فاصله هوایی بین روتور و استاتور عمل کرده و باعث القای جریان در سیم پیچ های روتور می شود. این پروسه تولید نیرو در اثر جریان روتور ، میدان مغناطیسی را تغییر می دهد و روتور را می چرخاند. اگر سیم پیچ ها در چندین قطب مرتب شده باشند ، فرکانس چرخش میدان مغناطیسی کمی کوچکتر از فرکانس بکاربرده شده در منبع تغذیه موتور خواهد بود (برای موتور 2 Poleو فرکانس ورودی 50/60 Hzدر حدود 3000/3600 دور و برای موتور 4 Pole فرکانس 50/60 Hz در حدود 1500/1800 Hz دور خواهد بود). به هرحال اگر روتور با همان سرعت تغییر میدان مغناطیسی حرکت کند، دیگر بر روی آن گشتاوری ایجاد نخواهد شد. بنابراین روتور همیشه با سرعتی کمی کوچکتر از چرخش میدان مغناطیسی می چرخد تا گشتاور تولید کند .
به هرحال اگر روتور با همان سرعت تغییر میدان مغناطیسی حرکت کند ، دیگر بر روی آن گشتاوری ایجاد نخواهد شد . بنابراین روتور همیشه با سرعتی کمی کوچکتر از چرخش میدان مغناطیسی می چرخد تا گشتاور تولید کند . این تفاوت در سرعت با نام فرکانس Slip یا لغزش شناخته می شود.
سرعت در این نوع موتور به سه عامل فرکانس ورودی ، نحوه سیم بندی و بار بستگی دارد. بنابر این برای کنترل دور موتور باید فرکانس منبع را کنترل کرد.
برای تغییر فرکانس ، تغییر ولتاژ نیز می بایست مورد توجه قرار گیرد زیرا با کاهش فرکانس ، امپدانس سیم پیچ های موتور عوض می شود و اگر قرار باشد سطح ولتاژ پایین نیاید شار مغناطیسی آنقدر بالا می رود که موتور را به حالت اشباع برده و به آن صدمه می زند . از طرفی اگر فرکانس بیش از حد نرمال افزایش یابد ، ولتاژ بالاتری برای حفظ ماکزیمم شار مورد نیاز است و این معمولا اتفاق نمی افتد زیرا با افزایش سرعت گشتاور(Torque) کاهش در موتور های القایی نمودار سرعت و گشتاور مطابق شکل زیر است.
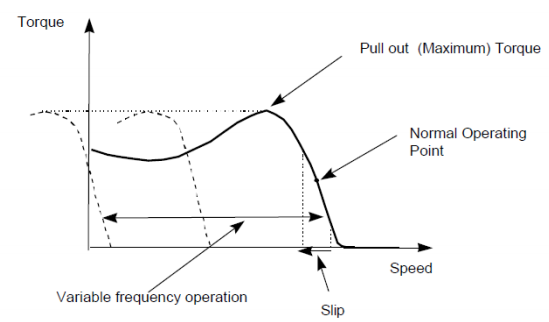
با مشاهده دقیقتر شکل بالا در می یابیم که با افزایش سرعت از حالت سکون به نقطه نرمال در ابتدا گشتاور بالا بوده و به تدریج با افزایش سرعت کاهش پیدا می کند و بعد از کمی افزایش سرعت این گشتاور دوباره شروع به افزایش می کند تا به نقطه Pull Outو ماکزیمم گشتاور برسد و از آنجا شروع به کاهش می کند تا به نقطه کار نرمال خود می رسد. بنابراین رفتار موتور از شروع حرکت تا رسیدن به سرعت نامی رفتاری کاملا غیر خطی است.
شایان ذکر است که در درایو موتور، AC بدلیل اینکه این نمودار خطی نیست درایو نمی تواند از روی محاسبه مقدار جریان را حدس بزند که موتور در حال توقف یا سرعت گیری است بنابراین برای تشخیص رفتار موتور تکنولوژی Vector Control توسعه داده شده است که کار آن بررسی وضعیت سرعت موتور در حالت های مختلف است و بر اساس آن اینورتر می تواند تشخیص دهد که موتور در حال قفل شدن است یا در حال افزایش سرعت.
روشهای کنترل در درایو : AC
به منظور تضمین عملکرد درایو در حالت های پایدار و گذرا روشهای مختلفی بکار گرفته شده اند. این روشها به دو گروه کلی عددی Scalarو برداری Vectorتقسیم می شوند. در روش عددی فقط مقدار پارامتر مورد نظر کنترل می شود اما در روش برداری مقدار و زاویه (بردار) پارامتر مورد نظر کنترل می شود.
الف : روشهای عددی
1- روش :V/F
در این روش ولتاژ و فرکانس خروجی با نسبتی خاص به خروجی اعمال می شود در این روش معمولا اینورتر یک ولتاژ Boostبرای غلبه بر تلفات و رفتارغیر خطی موتور در فرکانس پایین به موتور اعمال می نماید. در این حالت ، ولتاژ به تدریج با افزایش فرکانس افزایش پیدا کرده و سطح میدان مغناطیسی موتور را در حد مورد نیاز نگه داشته می شود.
2- روش Flux Current Control
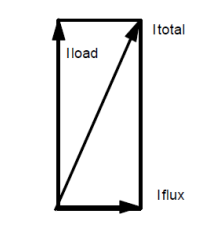
یکی از روش های کنترل در اینورتر است که بر اساس آن جریان خروجی با دقت اندازه گیری شده و با ولتاژ اعمالی مقایسه می شود. بدین ترتیب جریان خروجی حقیقی (Load) از جریان مجازی شار مغناطیسی جدا شده و درایو با کنترل جریان مجازی ، شار مغناطیسی موتور را برای شرایط مختلف کاری بهینه می کند.
بکارگیری این روش باعث بهتر شدن کارائی موتور ، بهبود کنترل گشتاور و پاسخ سریعتر موتور به تغییرات خواهد شد اما کارایی آن از روشهای Vector کمتر است.
ب : روشهای برداری
Field Orientation Control -1
این روش بر اساس کارکرد موتور DCطراحی شده که در آن جریان میدان (تولید کننده شار میدان) و جریان آرمیچر (تولید کننده گشتاور) به صورت همزمان و مستقل کنترل می شود . کنترل مستقل این دو جریان سبب
کارائی بهتر ، کنترل گشتاور در سرعت پایین و پاسخ سریع به تغییرات بار خواهد شد.
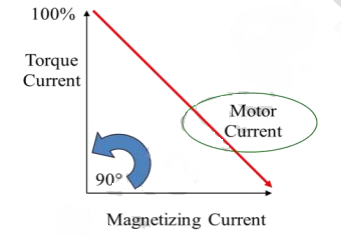
در موتور القایی جریان سیم پیچ استاتور تعیین کننده شار میدان و گشتاور موتور است. بنابراین برای کنترل مستقل گشتاور و شار میدان نیاز به کنترل اندازه و اختلاف فاز جریان و بعبارت دیگر بردار جریان می باشد. برای تشکیل بردارجریان نیر نیاز به داشتن موقعیت روتور می باشد. ازآنجا که درایو مقادیر ولتاژ ، جریان و فرکانس را برای اعمال به مدولاتور عرض پالس تولید می نماید ، گشتاور موتور بصورت غیر مستقیم کنترل می شود.
Sensorless Field Orientation Control -2
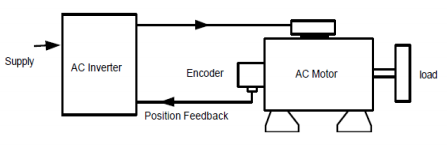
این شیوه بر اساس مدل Field Orientation Control پیاده سازی شده است و تنها در نحوه گرفتن فیدبک با شیوه بالا متفاوت است. بدلیل هزینه اضافی و پیچیدگی استفاده از انکودر بعنوان فیدبک موقعیت، در این شیوه که در چند سال اخیر ارائه شده است فیدبک موقعیت حذف شده و موقعیت واقعی روتور توسط یک مدل ریاضی محاسبه می شود. بدین منظوراینورتر باید :
– مقادیر ولتاژ و جریان خروجی را با دقت بالا اندازه گیری کند.
– اطلاعات دقیق از موتور شامل مقاومت استاتور و موتور داشته باشد.
– تاریخچه ای از عملکرد موتور برای پیش بینی رفتار موتور به لحاظ دمایی داشته باشد.
– قابلیت انجام محاسبات با سرعت بسیار بالا داشته باشد.
شایان ذکر است که قابلیت های Fluxکنترل و V/Fکنترل نیز در این روش وجود دارند .






