گشتاور یا تورك( Turaqe ) حاصلضرب برداری نیروی وارد بر یك جسم از نقطه اثر نیرو تا نقطه ای كه جسم بر اثر همین نیرو شروع به دوران می كند.گشتاور نیرو و انرژی لازم برای گرداندن یك شی میباشد.گشتاور تولید شده به وسیله ی یك موتور توان كششی یارانشی را برای گرداندن چرخها ایجاد می کند. مثلا زمانی كه می خواهید با یك آچار پیچی را بچرخانید نیروی لازم برای گرداندن پیچ گشتاور نام دارد.در این حالت گشتاور با مقدار نیروی لازم ضربدر فاصله مركز پیچ تا مكانی كه نیرو به آچار اعمال می شود برابر است.
واحد های گشتاور عبارتند از نیوتن بر متر و كیلوگرم بر سانتی متر و فوت بر پوند. معادله گشتاور T=R*N می باشد که :T گشتاور (TORQUE) و :Rشعاع و :Nنیروی اعمال شده، بنابر این هرگاه بخواهیم گشتاور را افزایش دهیم یا آچار بلندتری انتخاب می كنم یا نیروی اعمال شده به آنرا زیاد.
گشتاور با احساس کردن انحراف حقیقی محور به وجود آمده به وسیله یک نیروی پیچشی یا با پدیدار کردن آثار این انحراف اندازه گیری میشود. تحت گشتاور سطح یک محور دچار تراکم و کشش میشود. برای اندازه گیری گشتاور، معمولا عنا صر استرین گیج به صورت جفت روی محور قرار گرفته اند. افزایش در طول را یک گیج اندازه میگیرد (در جهتی که سطح تحت کشش است) و کاهش طول را گیج دیگر در جهت دیگر اندازه میگیرد. حسگرهای گشتاور اولیه، از ساختارهای مکانیکی مطلوب با استرین گیجها تشکیل شدند. هزینه بالا وقابلیت اطمینان کم آنها عدم پذیرش صنعتی را به دنبال داشته. اگر چه ساخت حسگرهای گشتاور را تکنولوژی مدرن کم هزینه کردهاست، با این وجود کنترل کیفیت روی محصول، نیاز به اندازه گیری دقیق گشتاور را افزایش دادهاست.
ترانسدیوسر گشتاور
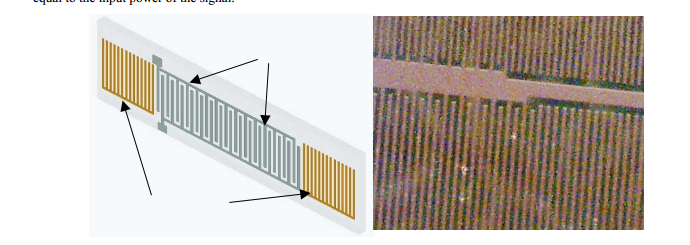
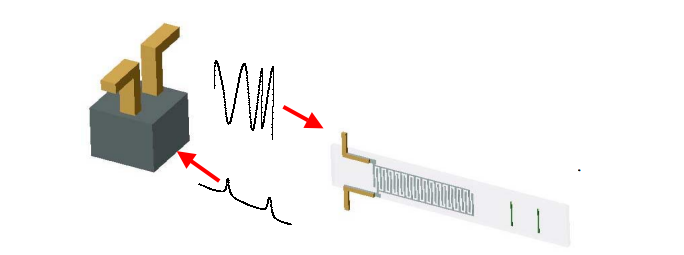
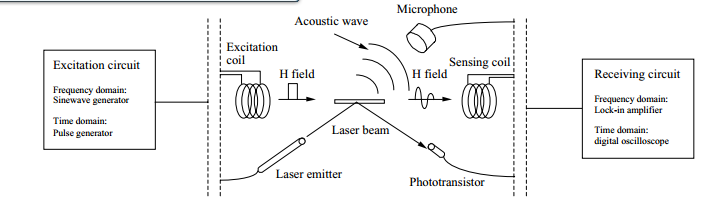
حسگر یا ترانسدیوسر گشتاور، ابزاری ایست برای تبدیل، اندازه گیری و ثبت گشتاور سیستمهای گردنده، مانند میل لنگ موتور یا شفت ژنراتور و… دو مدل گشتاور به نام گشتاور استاتیکی و گشتاور دینامیکی داریم. اندازه گیری گشتاور استاتیکی به صورت نسبی آسان است اما اندازه گیری گشتاور دینامیکی به دلیل اینکه به انتقال اثراتی مثل الکتریسیته و مغناطیس از شفت تحت اندازه گیری، به یک سیستم استاتیک نیاز دارد بمراتب سختتر می باشد. حسگرهایی که به عنوان حسگرگشتاور استفاده می شوند از نوع کرنشسنج می باشند که روی شفت در حال چرخش نصب میشوند. چون که حسگر به تغذیه نیاز دارد وضمنا سیگنال خروجی هم باید خوانده شود، اندازه گیری گشتاور دینامیکی سختتر میشود. برای این کار اغلب در سیستمهای قدیمی تر رینگهای لغزنندهٔ حلقوی به کار برده میشد که در سیستمهای نو حسگرهای وایرلس به کار برده میشوند. همچنین با کمک روشهای ارسال وایرلس اکنون حتی A/D converterو رکوردره اراهم میتوان روی شفت گذاشت و دقت اندازه گیری را به مقدار زیادی افزایش داد. سنجش گشتاور با تکنیک پیزوالکتریک بر اساسSAW وBAW قرار دارد. یکی از کاربردهای حسگر گشتاور که منجر به کاهش مصرف سوخت میشود در موتور اتومبیل است .اگر می خواهید درمورد حسگرهای بر اساس اثر SAW بیشتر بدانید، ابتدا باید در مورد موضوع تئوری امواجRayleigh یا تئوری Acoustic Wave Surface مطلب بخوانید. مثلا دو عدد شانه سر را طوری در هم فرو کنید که هیچ تماسی دندانههای آنها با هم نداشته باشند. در این حالت شما ساختاری را ایجاد کردهاید که آن را اصطلاحا مبدل اینتردیجیتال یا IDT می نامند. اکنون اگر با مادهای مناسب این ساختار را روی یک زیر لایه از جنس پیزوالکتریک پیاده کنید و به دو سر آن یک ولتاژ AC با فرکانسی معین اعمال کنید در سطح ماده زیر لایه موجی سطحی ایجاد می شود که آن SAW نامیده می شود. اگر یک ساختار IDT دیگر در طرف دیگر زیر لایه داشته باشیم بعد از تولید موج سطحی توسطIDT اول، دو سر IDT دوم ولتاژی ایجاد می کند که فرکانس آن با فرکانس موج ورودی در شرایط نرمال که هیچ اثر مکانیکی از خارج بر زیر لایه وارد نشدهاست حدودا برابر است. اما با اعمال کمیتی نظیر فشار یا کشش یا دما و… بر زیر لایه فرکانس موج سطحی دو سر IDTخروجی با فرکانس تولیدی در IDT اول متناسب با تغییر مکانیکی اعمال شده (که آن را در قالب تغییرات جرم یا mass loadingمیشناسیم) تغییر خواهد کرد. فرکانس تولیدی در IDT اول بسته به فاصله دندانههای شانهای شکل آن از یکدیگر، شکل و طول آنها در راستای عمود بر سطح دندانهها در سطح زیر لایه منتشر میشود. اما برای اندازه گیری گشتاور یک شفت با SAW دو عدد رزوناتور SAW را به صورت نصف پل (Half-Bridge) به هم متصل و روی شفت با زاویه۴۵ درجه نسبت به محور شفت محکم میبندند. اکنون با اعمال یک موج RF (معمولا ۲۰۰ مگاهرتزی) به صورت وایرلس به SAW، در طرف دیگر آن بسته به میزان دوران و گشتاور اعمال شده از شفت به SAWبه عنوان اثر بار، فرکانس موج دریافتی تا یک مگاهرتز تغییر خواهد کرد. بر همین اساس، گشتاور اندازه گیری شده میتواند تا دقتی برابر 1rpmداشته باشد.


پیکر بندیهای حسگری گشتاورسنج
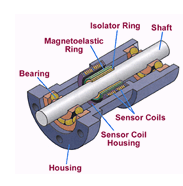
گشتاور میتواند با چرخش استرین گیجها ویا حسگرهای magnetoelastic و magnetostrictive اندازه گیری شود که همه به دما حساس هستند. با تغییرات گشتاور، ضریب نفوذ پذیری مغناطیسی برای میله تغییر میکند که میتوان آن را توسط یکmagnetostrictive sensor اندازه گیری کرد. ، وقتی میله بدون بار است ضریب نفوذپذیری آن در همه جا یکنواخت است. اما تحت گشتاور تعداد خطوط میدان مغناطیسی و به تناسب گشتاور ضریب نفوذپذیری تغییر میکند. این نوع حسگر از دو سیم پیچ اولیه و دو سیم پیچ ثانویه که در یک سمت میله قرار داده میشوند، ساخته شدهاست. حسگر گشتاور magnetoelastic، تغییرات نفوذپذیری خود را با اندازه گیری تغییرات در میدان مغناطیسی خود، اندازه گیری میکند. این نوع حسگر از یک میله باریک فولادی تشکیل شده که محکم به میله چرخان کوپل شدهاست . این ترکیب به عنوان یک آهنربای ثابت که شدت میدان مغناطیسی اش با گشتاور اعمال شده به میله متناسب است، عمل میکند. این میله باریک میان موتور و بار قرار داده میشود. یک حسگر مغناطیسی میدان تولید شده را به یک سیگنال الکتریکی خروجی تبدیل میکند که با گشتاور اعمال شده متناوب میباشد.


به دلیل محدودیتهای فضا حسگرهای چرخشی می بایست روی محور قرار داده شوند اماهمیشه این کار امکان پذیر نیست.
یک استرین گیج مستقیما میتواند روی یک میله نصب شود. اتصال حسگر گشتاور به منبع تغذیه و همچنین انتقال سیگنال اطلاعاتش توسط یک رینگ لغزان که روی میله نصب شدهاست به دلیل چرخش میله، ، انجام میشود. همچنین استرین گیج از طریق یک مبدل هم به منبع میتواند وصل شود در نتیجه نیاز به نگهداری از رینگ لغزان از بین میرود. ولتاژ تحریک به صورت القایی برای یک Strain gauge کوپل میشود و خروجی Strain gauge به یک پالس تبدیل میشود. بیشینه سرعت 1500rpm برای چنین ترکیبی میباشد.
Strain gaugها را می شود روی بخشهای ثابت نیز قرار داد. گشتاوری را که از میله به قطعات منتقل شدهاست را این حسگرهای عکس العمل، اندازه گیری میکنند. اما این اندازه گیری دقیق نیست زیرا اینرسی موتور را در نظر گرفته نمی شود . Strain gaugeهایی که برای اندازه گیری گشتاور استفاده میشوند شامل فویل، نیمه هادی منتشر شده و انواع لایه نازک است. اینها میتوانند به صورت مستقیم با لحیم کاری یا چسب به میله متصل شوند. اگر نیروهای وارده زیاد نباشند و بتواند یک بار نامتعادل را تحمل کند، در نتیجه میتوان لوازم جانبی الکترونیکی شامل باتری، تقویت کننده و فرستنده رادیویی روی میله قرار داد. حسگرهای proximity و جابجایی میتوانند گشتاور را با اندازه گرفتن جابجایی زاویهای بین دو انتهای یک میله به دست آورند. با وصل کردن دو چرخ دندانه دار یکسان به دو انتهای میله با یک فاصله خاص، جابجایی زاویهای ایجاد شده را میتوان توسط گشتاور اندازه گرفت. حسگرهای proximity یا فوتوسل که روی هر چرخ دندانه دار نصب شده اند، دو ولتاژ که اختلاف فازشان باافزایش گشتاور وارد بر میله زیاد میشود تولید میکنند. روش دیگری برای اندازه گیری گشتاور ،فوتوسل است که هرچه گشتاور افزایش مییابد چرخهای دندانه دار روی هم بیشتر میفتند و برای همین نور کمتری به سمت دیگر میرسد.
میتوان با حسگرهای دیگری از جمله حسگرهای نوری، القایی، خازنی و پتانسیومتری ، جابجاییهای ناشی از گشتاور را اندازه گرفت. برای مثال یک گشتاور سنج از نوع خازنی کارکرکردش به این شکل است که با تغییر گشتاور فاصله بین دو صفحه تغییر میکند و ظرفیت خازنی آنها عوض میشود. حسگر مقدار گشتاور را با اندازه گرفتن این تغییر خازنی اندازه میگیرد.
کاربردهای گشتاورسنج
گشتاور سنج یا ترکمتر برای اندازه گیری گشتاور وسایلی مثل موتور ، گیربکس یا حتی در شیشه نوشابه که جزو سیستمهای دوار یا گردنده هستند مورد استفاده قرار میگرد. برای مثال اگر در شیشه نوشابه با گشتاور بیش از استاندارد بسته شود ، باز کردن به کمک دست مشکل و برای همین باید کارخانه های تولید نوشابه ترک متر یا گشتاور مناسب برای پیچش در شیشه را تنظیم کنند. همچنین گشتاور سنج میتواندترانسمیتر یا ترانسدیوسر گشتاور باشد یعنی به صورت دستی و یک نشان دهنده و یا با خروجی باشد باید دقت کرد که گشتاورسنجی محورهای دوار و در حال حرکت یا دینامیک از گشتاور سنجی نمونه های ثابت و استاتیک سختتر است . البته با استفاده از تکنولوژی های جدید و مدلهای ریموت این اندازه گیری راحت انجام میشود . اطلاعات جمع آوری شده روی dataloggerها برای کنترل کیفیت میتواند انباشته شده و نتایج گزارش داده میشود. اندازه گیری نرخ برداشت براده، کالیبره کردن ابزارهای گشتاور، اندازه گیری نیروهای سایش، آزمایش کردن فنرها و اندازه گیریهای بیودینامیک از کاربردها ی صنعتی دیگرحسگرهای گشتاور است.